Baterias
O projeto conta com duas baterias, a Turnigy e a “Battery A”. A Turnigy é uma bateria adquirida com tecnologia de LI-PO (polímero de lítio) com capacidade mínima de 10000mAh e tensão máxima de 14,8V na configuração de 4S1P. A “battery A” é uma bateria montada cujas informações foram cedidas pelo Salviano, possuindo uma tensão média de 12V (com tensão máxima de 16,8V) e capacidade de 12500mAh em uma configuração de 4S5P.
As informações obtidas de ambas as baterias, foram compiladas na tabela abaixo:
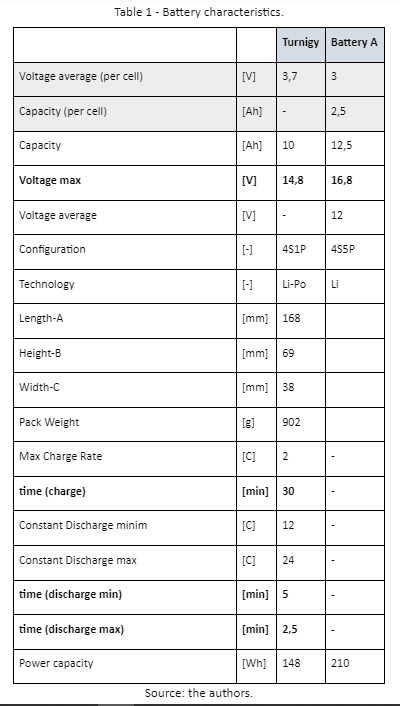
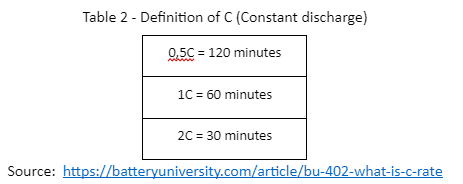
Como as informações da Turnigy foram obtidas pelo datasheet fornecido no site da HobbyKing. Conseguimos obter informações mais detalhadas como o tempo de carga e descarga de acordo com o fabricante. Apenas recordando que:
Por fim, “power capacity” faz referência à quantidade de energia armazenada na bateria, este valor é obtido através da multiplicação da corrente [A] e tensão [V].
Com as informações das duas baterias e considerando o cenário de que estas baterias realmente possuam e atinjam os valores obtidos na tabela 1, foi criado uma configuração que potencializasse a capacidade fornecida para o sistema, neste caso utilizando-as em paralelo (10A + 12,5A = 22,5A). Reforçando que estamos admitindo que as baterias estejam em bom estado, assim o tempo necessário de descarga (não considerando nenhum percentual de segurança de descarga, que seria um percentual da capacidade que nunca será usado, geralmente 20%) é obtido t = (capacidade [Ah] / corrente [A])*60, para obtermos a resposta em minutos.
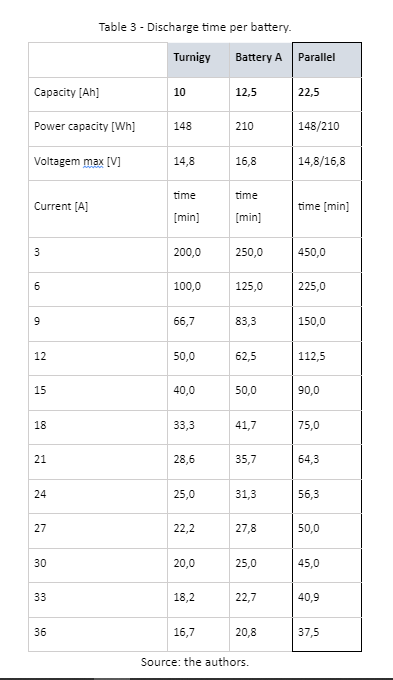
Apenas para fins de melhor visualização, o gráfico com os dados é apresentado a seguir.
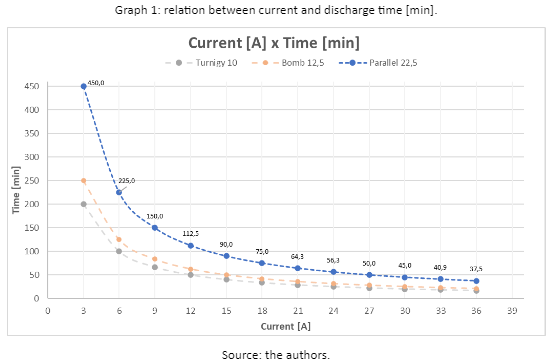
Como é de se esperar, a bateria montada em paralelo é descarregada mais rápido conforme há o aumento da corrente. O desafio então é encontrar uma corrente que atenda ao sistema e que o tempo seja suficiente para cumprir o percurso da prova, considerando possíveis imprevistos. Além disso, há um sério agravante com relação ao aumento da temperatura, que pode contribuir para o superaquecimento do AUV. Como não temos dados do fabricante com relação a testes de temperatura em relação à corrente de descarga, uma alternativa seria realizar o nosso próprio teste no laboratório.
Conforme levantamento feito para a edição passada, os componentes que demandam energia do sistema eram:
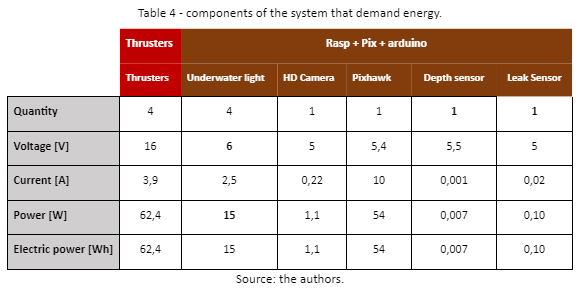
Os valores de quantidade de componentes necessários no AUV, tensão, corrente e potência foram retirados dos datasheets disponíveis no site Blue Robotics e estes valores também estão disponíveis na aba “Demanda_sistema”.
Com os dados compilados, notamos que há um range de tensão (6V-16V) entre os componentes que pode prejudicar a operação dos sistema, além da alternativa de inserir todos os componentes em uma mesmo casulo e inserir um dispositivo que não afeta os componentes que precisam de baixa tensão, foi proposto uma alternativa de um segundo casulo.

Os dados obtidos, fazem referência à quantidade de corrente e potência que o sistema demandará para operação, logo é um parâmetro para que a bateria consiga garantir o fornecimento para o sistema completo.
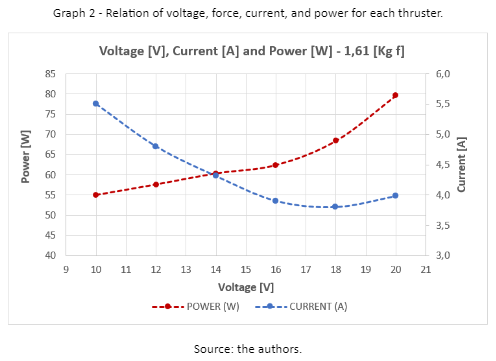
Falando dos propulsores, foi considerado que eles operassem à 2 nós e com 1,61 Kg f, as informações de corrente, potência, RPM e eficiência de acordo a tensão, pode ser encontrada no arquivo em excel “T200-Public-Performance-Data-10-20V-September-2019” nos anexos mas o compilado das informações estão a seguir.
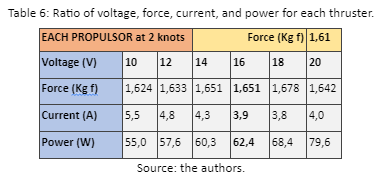
Conseguimos observar que há um trade-off interessante para nosso objetivo, no qual o propulsor consegue fornecer uma maior potência com uma corrente menor.
Considerando o cenário de que todos os componentes estejam em apenas um casulo, e que os valores de tensão, corrente e potência requeridos pelo sistema estejam de acordo com o discutido anteriormente com os componentes listados acima, obtemos os seguintes dados:
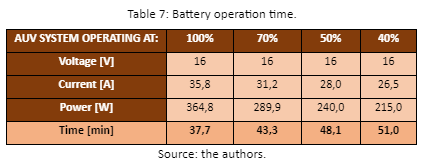
A informação do percentual de operação do sistema a 100%, por exemplo, considera que os componentes estarão operando em sua capacidade máxima em todo tempo de operação.
Assim, conseguimos uma estimativa do tempo de operação da bateria para suprir a necessidade do sistema considerando alguns cenários de operação dos componentes.