Simulação no Gazebo
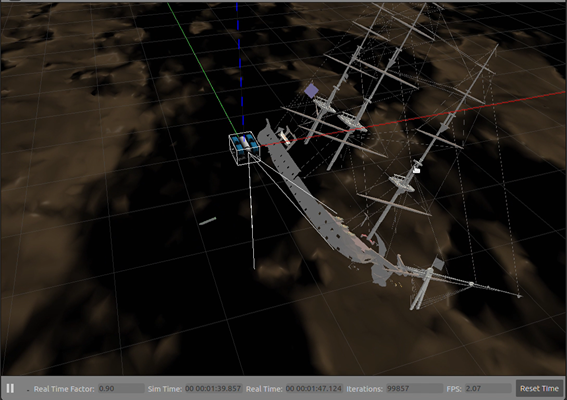
As simulações em ROS foram realizadas no simulador Gazebo, já que dispõe de diversas ferramentas e é o que tem melhor compatibilidade com o ROS. A simulação ocorreu de acordo com o esperado, conseguindo realizar manobras e medir dados dos sensores de forma coerente. Futuramente pretende-se aumentar a complexidade do veículo, integrando o cálculo de distância de obstáculos através da câmera e de um sensor ultrassônico ou DVL.