Computer vision
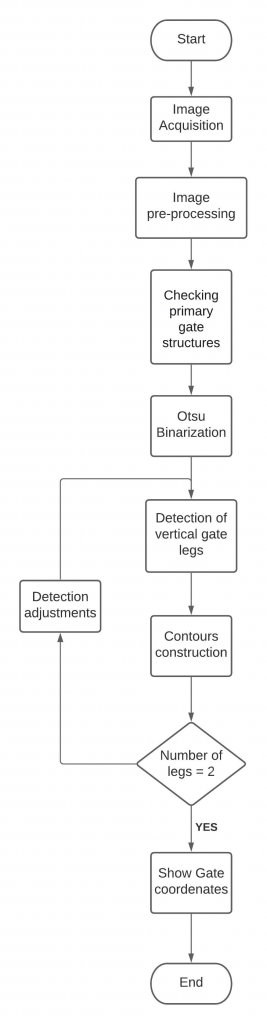
Para a parte de processamento de imagem, a equipe Terra optou por utilizar a biblioteca OpenCV, com a implementação dos códigos sendo feita na linguagem Python. O código implementado através do OpenCV utiliza métodos padrão desta biblioteca para a detecção do portal da prova, tarefa qualificatória nesta competição. Seu funcionamento se dá a partir da detecção das barras verticais presentes no portal da competição, e da determinação de suas coordenadas. Esta detecção é feita a partir de operações morfológicas do OpenCV, que permitem a detecção de linhas horizontais e verticais em imagens. Assim, com a identificação da coordenada central do portão o AUV consegue identificar a coordenada central do mesmo e a partir disso identificar a coordenada central do personagem escolhido, que para esse projeto foi o policial. No fluxograma é possível compreender melhor como essas etapas foram programadas no código de processamento de imagem da equipe.
Após a determinação das coordenadas do portal e do policial na imagem, esse dado poderá ser enviado ao código de controle do AUV, que realizará o acionamento dos propulsores de acordo com a direção que o veículo deve seguir para passar pelo portal pelo lado previamente definido.